户外智能巡检机器人
基于ROS2 Nav2的自动驾驶巡检系统
这是一款面向户外场景的智能巡检机器人,具备厘米级定位精度、自主导航、异常行为检测等核心功能。 采用激光雷达/IMU/RTK紧耦合融合定位技术,结合深度学习目标检测算法,实现全天候自动化巡检。 目前已在全国10+个省市部署应用。

产品演示
户外智能巡检机器人实际工作场景
核心功能
多维度技术能力支撑
厘米级定位
激光雷达/IMU/RTK紧耦合融合定位,实现户外场景厘米级稳定定位
智能导航
基于ROS2 Nav2的导航系统,支持DWB、TEB等多种规划器
异常检测
基于YOLOv8的异常行为识别,支持遛狗、吸烟、打架等场景检测
自动回充
AprilTag视觉识别定位,实现自动对接充电功能
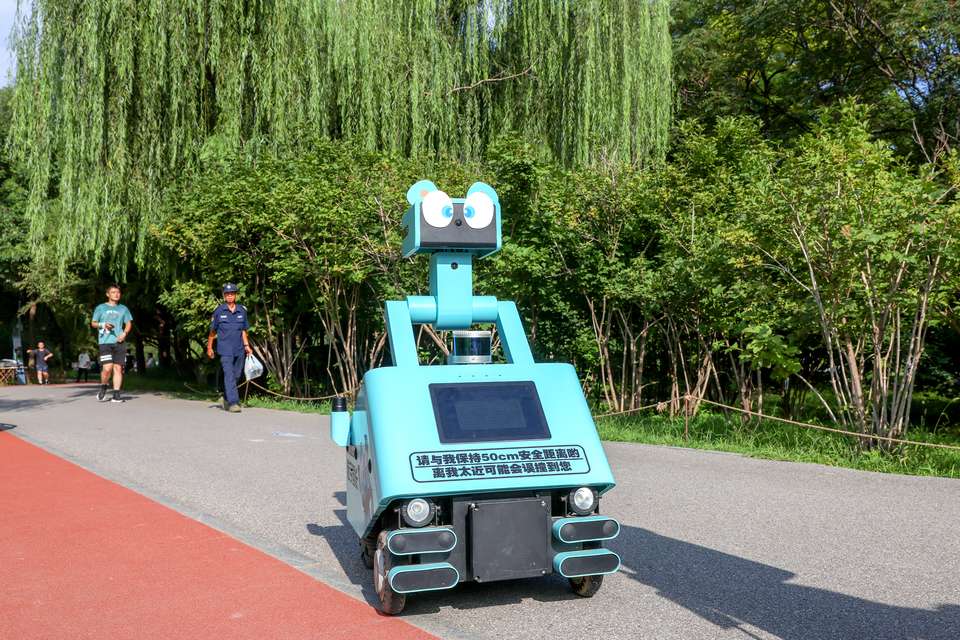
项目实拍
现场部署与实际应用场景








效果图
产品渲染与界面设计